Jumper Bikes
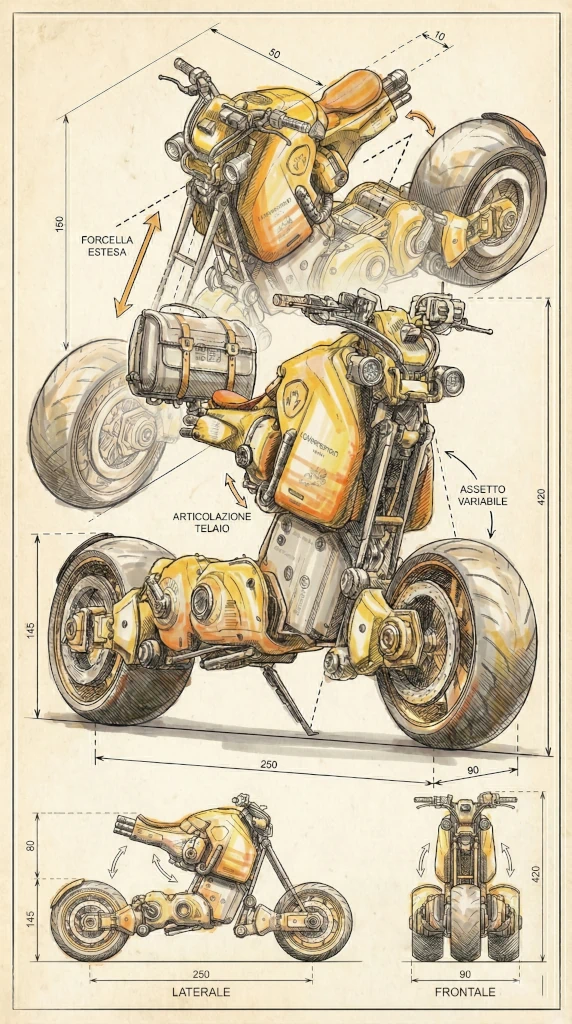
JUMPER Bikes explore a new approach to motorcycle mobility through variable-geometry systems capable of lifting, shortening, extending, and dynamically adjusting the chassis to overcome uneven terrain and enable controlled jumps. The concepts investigate how reconfigurable structures, articulated linkages, and vertical lift mechanisms could support alternative styles of riding, especially in environments where conventional suspension systems reach their limits. This research frames the motorbike as an adaptive mobility platform rather than a fixed mechanical object, speculating on future riding behaviours and new forms of physical interaction with terrain.





Studies in advanced mobility engineering show that variable-geometry mechanisms can significantly improve stability, energy distribution, and rider control in off-road or obstacle-dense contexts. Research also highlights how reconfigurable wheelbases, active lift systems, and articulated frames can optimise load transfer, increase obstacle-surmounting capacity, and enhance shock absorption during vertical transitions. These findings suggest that adaptive architectures may reduce both mechanical stress and rider workload, enabling vehicles to modulate their physical configuration in real time in response to changing terrain conditions.